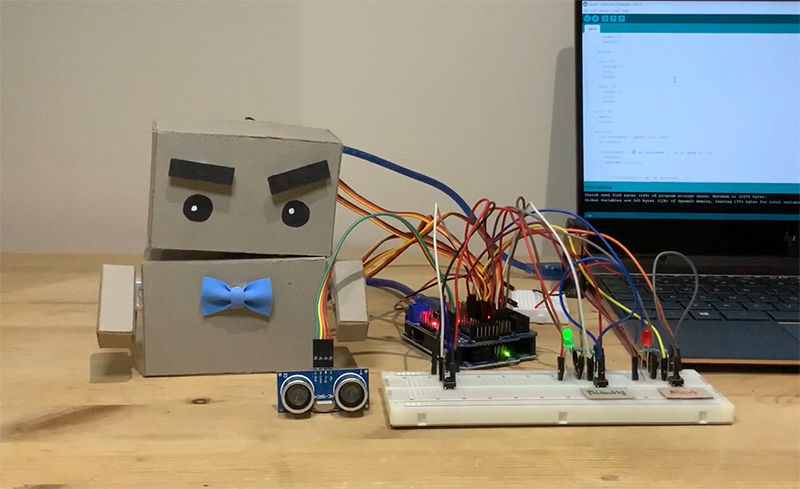
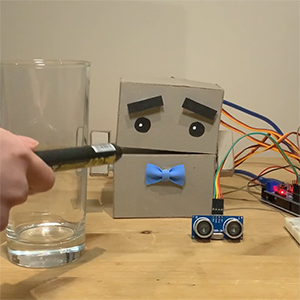
When Spud starts up, it will be initialised in this neutral position.
If Spud does not detect anyone or hear any voice commands, it will stay or move back to this neutral position.
To switch to the alert mode, the user has to click on the button labelled Alert on the breadboard.
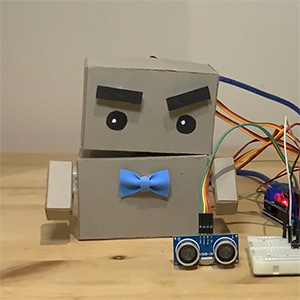
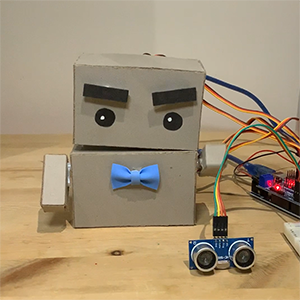
When someone walks close to the user, Spud’s eyebrows will be angled up in an angry expression with its arms up.
This happens when the ultrasonic sensor senses that a person walking towards the user is less than 1.3 meters away.
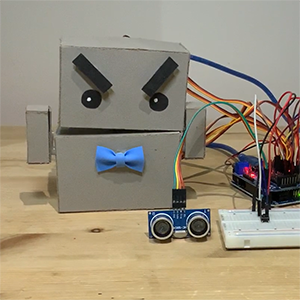
If the warning is ignored and the person walks closer, Spud will shake its head as if to say no and raise its arm up in a stop gesture.
This happens when the ultrasonic sensor senses that a person walking towards the user is less than 0.8 meters away.
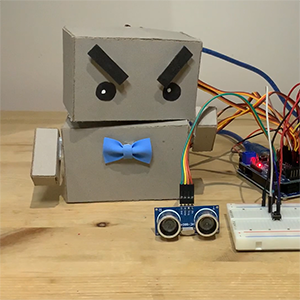
If Spud hears something loud, it will move its eyebrows in a scared expression and raise its arms up covering its ears to make the person stop.
This is currently simulated by pressing on a button on the breadboard.
To switch to the friendly mode, the user has to click on the button labelled Friendly on the breadboard.
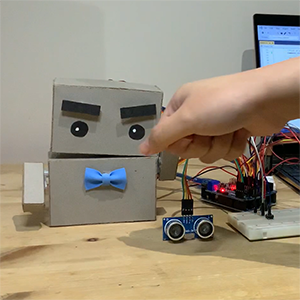
When someone walks towards the user, Spud will greet them by waving its arms to say hello.
This happens when the ultrasonic sensor senses that a person walking towards the user is less than 0.8 meters away.
When Spud hears the 'Fist Bump' voice command, it will raise its arm up to fist bump the person.
This happens when the microphone on the laptop hears and recognises the word 'Fist Bump'.

When Spud hears the 'Dance' voice command, it dances by moving all his eyebrows, head and arms at the same time.
This happens when the microphone on the laptop hears and recognises the word 'Dance'.
Youtube Link: Spud Demonstration Video