Welcome to my Portfolio, my name is Ryan and I'm in my final semester of study at UQ,
studying a dual degree in Business Management and Information Technology. I have a keen interest in design and for making fun and creative concepts that are out there and challenge everyday expectations.
The Helping Hand
This digital portfolio is for my creation “The Helping Hand” a sassy piece of technology which is used in social situations. The hand can
tell the people around you to back off and leave you alone, or try to make friends by waving and being happy, all without you having to do anything!
The goal of this concept was to personify technology to make it relatable and give it a personality to properly externalize your mood through robots.
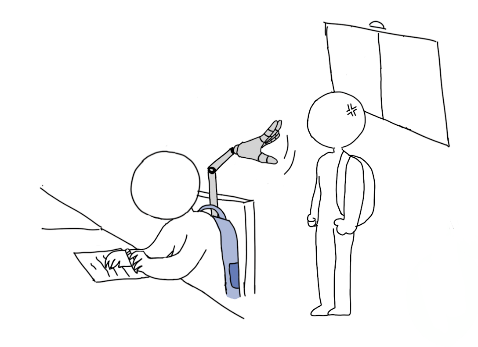
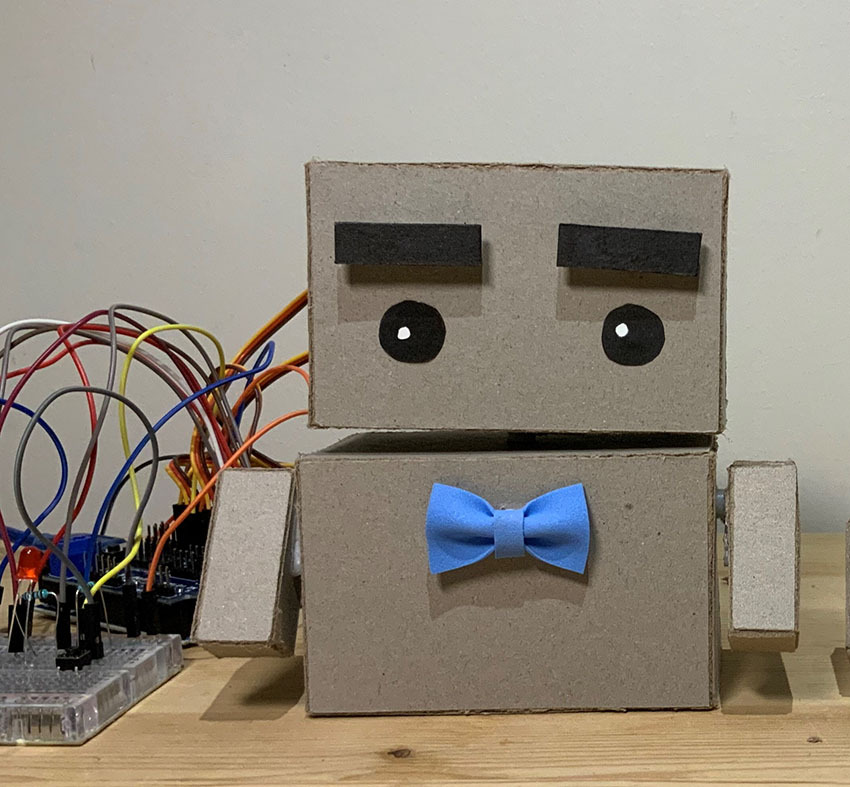
Figure 1: The Helping Hand robot design.
Intended Concept 🤞
For this project there has been a clear goal throughout the design process, aiming to create a working concept which can be used to communicate for you to others.
The Helping Hand is a moving hand that can be friendly or hostile depending on whether the user wishes to be approached or left alone,
without the need to talk, look or interact with anyone. This design is apt in the current isolated environment,
enabling social distancing effectively while also being a novel method of interaction with others as the hand can mock,
insult or be friendly to those approaching in order to get a desired response.
Design Sketches
Figure 2: Our inital sketch for the concept.
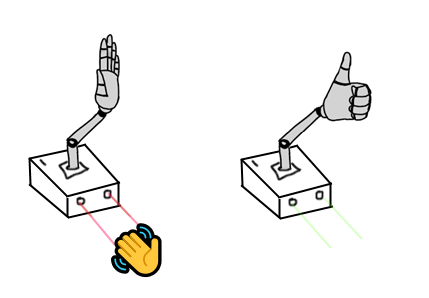
Figure 3 A simple diagram of the concept working to keep others away.
Overall the concept should move fluidly similar to that of a real hand,
and perform commonly known gestures. This would be done in a way that effectively gets the point across to others around the user where the created gestures are either welcoming and inviting others over,
or insulting and trying to actively get others to move away from the user.
Final Product 👌
The Helping Hand can be seen in this exhibit as a fully functioning response system that reacts in real time to anybody who approaches it.
Users can interact with the hand in person where it intends to keep you away through angry or dismissive gestures or depending on the user’s preference will try to be friends by waving or being friendly. All the created functionality can be seen in the live interaction video of me interacting with the hand below.
Video 1: Movement of the Final Product
How this product was created can be found below in the design process, however all aspects in this video and in the real concept shown during the exhibition are all working as created. None of the hand’s movements or gestures have been simulated as all the wires pull the fingers into the desired gestures which are used.
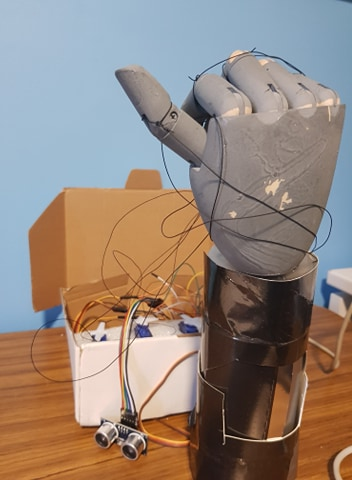
Sadly the final product was not as functional as desired as the wooden material of the hand was very heavy and difficult to manipulate using the small 9g servos provided, for future endevours,
a lighter and malleable material would have move easier and some spring or flex could move the hand back to the default position after it had been posed.
Figure 4: Work in progess on the final Helping Hand product.
Design Process 🤘
The creation of this concept was an iterative process, with most of the work documented in my online journal with the inspiration, prototypes and final process for creating the robotic hand, a link is in the navigation on the left. Creating ‘Sassy Tech’ was the goal from the start, with the given theme,
and a vulgar or sweet hand that does over the top gestures to get its own way is something that many people feel conveys this sassy emotion. This moving and sassy hand was the first stage of this long design journey, where the final concept and build was made with just this idea to start from.
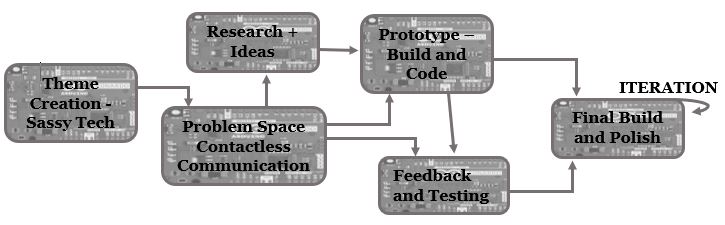
Figure 5: The stages of the design process used in this concept.
The process above was followed throughout the semester, where a problem space was created in which this sassy hand could solve people’s problems and research helped develop the prototype build. This was an important step where concepts came off paper and screens and came to life, moving and waving in the form of cardboard, strings and a lot of wires.
This prototype can be seen in the video below and helped develop the final concept into the improved version you see here today. In order to get to this final stage however lots of building and testing was involved along with gathering feedback on gestures interpretation, looks, movement and target audience-based appropriateness.
Iterations from Feedback
Key aspects of the design process include major feedback that changed the direction of the concept. These came from interim checks with family at home and from design stages like the prototype feedback or discussion with my team member where we compared notes and design choices for our sassy robots. The major changes which came from these designs include:
Strings pulling the hands from the back to better move the fingers in comparison to the prototype where they had to pull themselves back
Multiple distance sensors to detect more than 1 angle of approach and offer interactivity dependant on the side of approach
Full arm motion at the base instead of just wrist spinning, to better wave and do full arm gestures
Offensive gestures are not taken personally due to the nature of a robot by any member of the user group; however, it has been brought up that parents and care-givers of younger audiences might not accept their children being exposed to them.
Prototype Video
Video 2: Prototype deliverable video of created hand
Technical and Physical Makeup
The physical form of the prototype is made from a combination of the following materials in no particular order:
A painted wooden hand
Thin metal wires acting as puppet strings
A plastic tube as the arm to house the wrist and arm servos
7 different servos for hand movement
2 distance sensors and a 9 volt battery
Lots of wiring connecting the Arduino and Breadboard
A strip of foam to keep the servos in place
Cardboard box to house the electronics & to mount the hand and sensors
Grey paint and cardboard for the look of the hand
Images from the build process
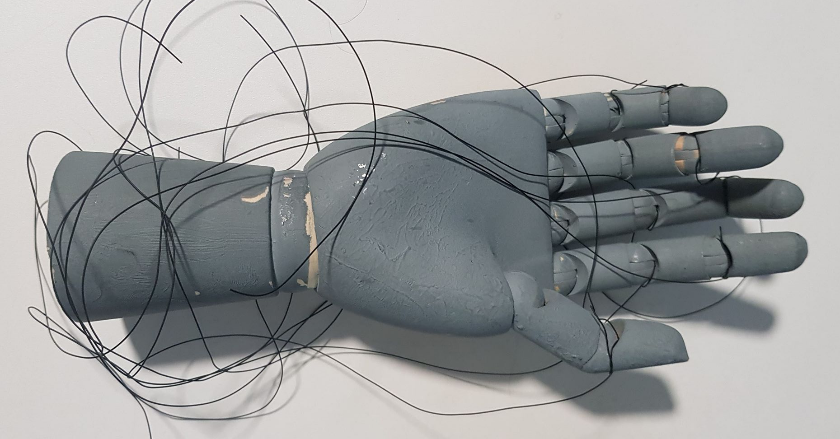
Figure 6: The wiring to pull the fingers of the hand.
Figure 7: The arm of the hand has been taken off and will be replaced.
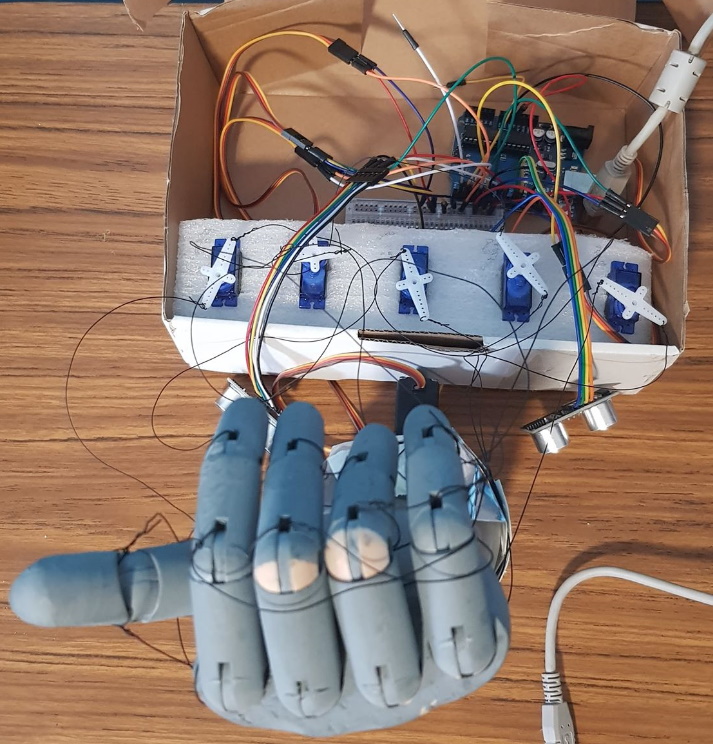
Figure 8: Servos have been inserted into the arm to move it.
Figure 9: Wiring required to link servos and distance senors to Arduino.
The step-by-step guide can be found in my design journal, but these materials have been upgraded from most of those used in the prototype to be more durable and sturdy as a concept, as the prototype was very fragile and easy to break itself by moving too much from the operating servos.
Digital aspects of the design are only the Arduino code which links the distance sensors to a simple loop which tracks the distance someone is from the device and which side they are on.
Depending on which side of the box the person is, the hand will rotate to face them, then react in the appropriate gesture according to the setting. These gestures are based off the distance detected, and at different distances gestures will be done. From the video or live exhibit, it should be obvious which types of gestures are done when, which is as follows;
Distance
Nice Response
Agressive Response
1.5 m
Waves in the detected direction
Ignore the person, or shooing motion
1 m
Finger or hand beckons them closer
Waves index finger, points away , starts counting down
70 cm
Thumbs up, hang loose, peace sign
Thumbs down, mimics talking using hand
30 cm
Fist pump, excited waving, pinkie promise motion
Can flip the bird, shake fist angrily or 'up yours'
Figure 10: Table of all set responses the hand makes
Project Reflection 👍
Looking at the final product I believe it is very close to meeting the ideal intended concept, while it may not be as polished or move as delicately as possible, it still conveys the messages in the gestures and movements made.
With proper equipment and the precise designs that come with current prosthetics (which was a big inspiration for this concept) there is a lot more refined work out there,
however it is not mine and not made by myself at home with what I could salvage so I am proud of what I have achieved here. Relating this project to the other sassy tech in this course, the facial expressions on Spud are very emotive, and the Annoying robot would be frustrating to no end, this rude hand fits in well to the theme of emotive tech done differently and in a novel way.
This project fell short of the desired outcomes as I don’t think many would be swayed by a moving hand to go approach their friend now that restrictions are lifting,
however a few months ago it would have made people think twice at the start of lockdown. User experience could be a bit more expansive with more interactions if I had a larger team,
as I was flat out building and refining the hand to do extra testing and research with more variables or different types of interaction, as building this robot took a lot out of me.
Overall this falling short does not discredit my work or discourage me, as I set the bar high with measurements requiring user to fully listen to a mute robot giving them directions and in this era with many distractions, they might not see it at all. Comparing the final design to the set outcomes in the prototype brief;
General Evaluation
Does the design actively solve the problem space ,persuading and/or dissuading others from approaching the user? (Rarely)
Does the design function properly, communicating clear and recognisable hand gestures most people recognise? (Most are recognised)
Is the concept durable/sturdy enough for public areas while also not being a burden on the user in terms of weight, bulk or distraction? (It is still bulky & rigid)
Is the concept novel or fun, in the opinion of potential users or people who interact with it? (Yes)
Therefore, the vague goals were vaguely met, showing the design needs some work to fully operate as desired, or the hand itself has a fundamental flaw of being too distracting that is entices those around it, despite its best efforts to be angry and unnaproachable.