My Desing Process
Ideation
The design behind Global Warning started with a group ideation session. As a group we came together to come up with ideas for us as a team with the theme “Digital Sensations made Physical” in mind. After building on multiple different ideas we came up with the idea of the interactive globe that you see on the right. It was at this point that we as a group decided to build our own separate prototypes within our team domain of Global Warming. My idea was critiqued by peers and the users of the device, finally developing into “Global Warning” as you see tonight.
Initial Prototype
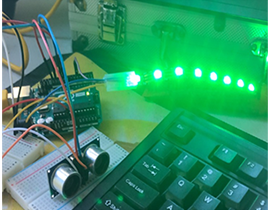
When constructing Global warning I started with determining how I would sense if rubbish were placed in either bins. I decided I would use an ultrasonic or distance sensor. The sensor would pick up if anything passes within a certain distance and make a record of that. Now I had one working I next programmed a second one for the other bin. It is these two sensors, connected with a LED strip that control what colour the globe is at any given time.
Additional Features
The next step in design was User Testing. The global bin was taken to some of the target users to get feedback on the current device and what paths to travel going forward. After a large amount of positive feedback regarding smell-based interactivity, I had to figure out how to implement this into the current device. This was done by wiring a diffuser into the device that can be controlled through my code. At this point I had the polished working prototype that you see tonight.
Detection Of Rubbish
Currently the device has two separate ultrasonic sensors detecting the region inside of the cardboard boxes acting as the bins. The bins both have a width of approximately 32cm. These sensors are looping on a 500-millisecond timer checking to see if an object passes the ultrasonic sensor that is closer than the edge of the box. distance. When the sensors detect an object closer than 32cm, you know rubbish has passed through. It will then do two separate things, first it updates the colour of the light, and secondly checks if the globe has reached the threshold to activate the smell.
Light Control
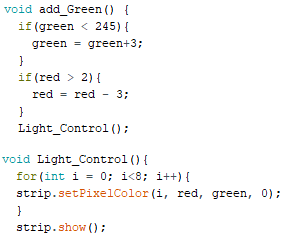
The light is entirely managed with some simple math with RGB colour codes and the ultrasonic sensors. Whenever the ultrasonic sensor within the recycling bin detects a piece of rubbish it will slightly increase the green within the current colour code and decrease the red by the same amount. This will provide a new colour code that is sent to the led strip and updates the colour of the globe. The same procedures were taken for when the ultrasonic sensor detects rubbish in the rubbish bin. The globe also starts off white before it has detected rubbish go into either bin.
The Scent
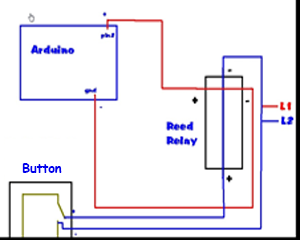
The scent comes from within the globe on top which is made from an old diffuser that I have modified to fit the light. I took the buttons that control the power of the diffuser and wired the short into a Reed Relay. The reed relay is then powered and connected into the Arduino, this allows me to have full control over the button and I can virtually push the button with a 5V signal from the Arduino. Within the code, when I update the lights there is also a check to see if the green has reached a certain threshold. If it has reached this threshold, a signal is sent to the relay shorting the button and activating the diffuser which releases the scent.