Overview
The SassMobile is your average household android that roams around harrassing people who watch too much TV. Using the power of hacking, verbal heckling and annoyingness, the SassMobile works to convince TV watchers to get up off the couch and go do something else.

Concept
Sassy Tech
Sassy technology is technology possessing a cheeky, playful personality, with a willingness to resist a human’s control. Furthermore, sassy tech targets human emotion to deliver an experience similar to interacting with a human. An example of similar tech includes Apple’s Siri. Siri is essentially a search engine, but makes the experience of searching for information more natural by using speech to imitate human interaction and give the effect of being a human assistant. But what if Siri had an sassy, annoying personality? Are there scenarios where this could be helpful or would it simply be infuriating? Our investigation answered this question by exploring how sassy tech could be used in an everyday, household environment.
Breaking bad habits
Our concept harnessessed sass by using it to help break the bad habits of people in an authoritarian manner. For many bad habits, simply knowing that a habit is bad isn't enough to make you stop. The addictive nature of junk food, smoking and caffine is enough to keep bringing people back, giving a feeling of helplessness. However there is a commonly overlooked solution that can cure a bad habit for good! It is the power of simply ruining the experience. While it is often difficult to achieve, preventing the brief bit of pleasure that comes out of a bad habit from happening will make anyone stop. This is the effect that our concept aimed to achieve.
Screen time
Screen time overuse has become a common issue in the age of technology and so our goal was to develop a robot that makes people spend less time watching screens by ruining their screen time. Named the SassMobile, the ideal product was a robot that roams around the house monitoring the time people spend on screens and taking measures when it deems someone has watched enough. After hacking their screen, the SassMobile would pester the user by dimming the brightness, changing channels, switching languages and performing other malicious attacks. Moreover, the robot verbally sasses the victim, prompting them to "go outside", "get a life" and "give up" until they give in and turn off the TV.
Fighting back
While the SassMobile's behaviour can be pretty intimidating, there are ways to fight back if one finds the courage. Obscuring its view, flicking its ears, and knocking it over will stall its ability to hack, resulting in some momentary relief. However, no action is without consequence. The SassMobile will become increasingly sassy and begin taking more drastic action to disrupt your TV time. Such as maxing the volume, powering off the TV, and seeing it become a fed-up, almost disappointed parent.
This back and forth argument between user and tech aims to show the user that treating the robot badly will only worsen the situation. The idea that a piece of technology can be offended is alien these days, and so people lose any sense of sensitivity or respect when interacting with technology. The SassMobile aims to make users consider how they're treating technology and that their actions have consequences. Because one day emotional tech may actually be technology with real emotion...
Target Users
These days screen play a part in nearly all aspects of our lives, from schooling and work, through to watching movies and playing video games. It's no suprise that screen time overuse has become such a common issue. The household SassMobile is designed to interact with anyone who watches too much TV and wear them down until they have a break. Accordingly, our target users are anyone who intends to moderate their screen usage.

Parents

Couch Potatos

Active people
Final Product
The final product includes the features necessary to deliver our intended experience. Such features include TV hacking capabilities, interactive sensors, speech and mobility. A missing element is the ability for the SassMobile to monitor how long a user has watched a screen and accordingly gauge when it's time to begin hacking, as well as the ability to hack various types of screens - the Sassmobile can only hack a television. Nonetheless, the SassMobile is able to facilitate the interactive experience of fighting with a robot while it trys to disrupt your screen time.
Interaction
The Sassmobile's behaviour is organised into phases of aggressiveness, progressing if the user ignores the robot or they physically interact with the robot such as by blocking its vision. The following interaction plan details an example user interaction, this plan may vary in response to how the user chooses to interact with the robot.
Interaction Video
Phase 1
The robot starts by roaming around the house saying passive statements
"Are you enjoying this show?"
"It's a beautiful day outside, not that you'd know…"
"Beep boop. Beep boop."
Phase 2
The user ignores the robot and continues to watch TV so the SassMobile begins mildly hacking and teasing the victim
*Robot Changes channel*
"I'm bored of this channel"
*Robot Turns down volume*
"Was that a profanity?"
*Robot changes language*
"You know Mandarin right?"
The user decides to fight back
*User throws a towel over the SassMobile, blocking it's view of the TV*
"Ahhh I'm blind!"
User gains some sympathy, removing the towel
"I missed seeing your pretty face"
Phase 3
The user continues to watch TV, so the robot puts the foot down
*Robot Turns off TV*
"I think your TV is broken"
The user has had enough
*User throws a projectile at the SassMobile*
"stop hitting me you loafer"
*Pull ears*
"I have sensitive ears"
The SassMobile is angry
*Robot puts volume to max*
"Need subtitles now?"
The user conceides defeat and turns off the TV.
"Wise choice..."
Design
1. Hacking
As a means of reducing the total screen time of users, the robot would be able to hack into any and all types of screens around the house. This includes the loungeroom TV, computer monitors and even mobile phones. There were some clear unknowns to investigate about the different hacking methods for different screen types. Online research uncovered that televisions could be easily hacked by sending remote signals using infrared LEDs. This meant that the robot would have access to all the buttons of a TV remote. On the other hand,
Assuming the robot gained the ability to hack a screen, the next question we considered regarded the type of hacks to do. If the goal is to get the user to turn off their screen and go do something else, is it enough to simply power off the TV or phone? In the case of a TV, the robot may have the ability to manipulate volume, channels, language and various other settings. We decided that in order to maximise the cheeky nature of this sassy robot, that it should mess around with as many settings as possible.
2. Mobility
In order for the robot to have access to all screens around the house, it either needed to possess the ability to hack screens remotely or move around the house. We decided that a Roomba would be the perfect vehicle for a robot of this size to navigate around a house. The idea of remotely hacking screens was quickly ditched since it didn't facilitate physical user interaction.
3. Communication
Our team decided that the SassMobile should have the ability to communicate with the user, beyond simply hacking screens. While changing channels and languages on the TV is a sassy thing to do, the robot would struggle to achieve an emotional connection with the user beyond simply making them angry. Furthermore, we would be able to incorporate a far stronger sense of personality into the robot were it able to address the user and respond to their actions.
The next step was to decide on the best way to make the robot to speak, considering how the sassy, eerie nature of the robot could be amplified. An early idea was to put subtitles on the screen which would have doubled up as a good deterrent for watching the screen. However, this was ruled out due to the difficulty of adding subtitle files through remote hacking. A more radical idea inspired by the Transformers movie was to rapidly switch between radio or TV channels and string together a message from the various channel audios. Alas, this too was deemed too difficult, leaving the obvious option of incorporating a speaker into the robot. The DF Mini Player Arduino part quickly presented itself as an effective way to prototype this speaker.
4. Personality
The robot’s personality was one of the more important features of the design, as it is a big part of sassy technology. In reference to the user goals, the prototype is aiming to make users aware of how they are treating technology by connecting with the robot on an emotional level. It needed to have an element of cheekiness, while being pretty stubborn and self-righteousness. Additionally, we decided that the robot needs to seem self-aware in order for the user to not treat it like any other basic piece of technology. Furthermore, that their responses to the robot will seemingly affect its feelings and in turn how it messes with the screens.
5. Appearance
Research showed that the appearance of technology has a significant effect on how people perceive and judge it. Accordingly, our team investigated the use of an ESP20 digital interface to display facial emotions. Despite being a relatively straightforward piece to set up with Arduino, we decided not to incorporate it into this design phase as it was not an essential aspect. Insead, another member of our team, Anshuman, built a mouth, eye and ears onto the SassMobile that could be interacted with.
6. User Interaction
User interaction with the prototype was deemed to be necessary way to achieve an emotional connection with the robot. We explored the possibility of using voice recognition for the user to converse with the robot, however it seemed pretty difficult to get working effectively. We decided that a more direct and novel interaction would be for the user to have to physically impede the robot’s ability to hack. This includes throwing a towel over the bot to obstruct its IR LED, knocking the robot and triggering a vibration sensor, and even flicking the robot’s ‘ears’.
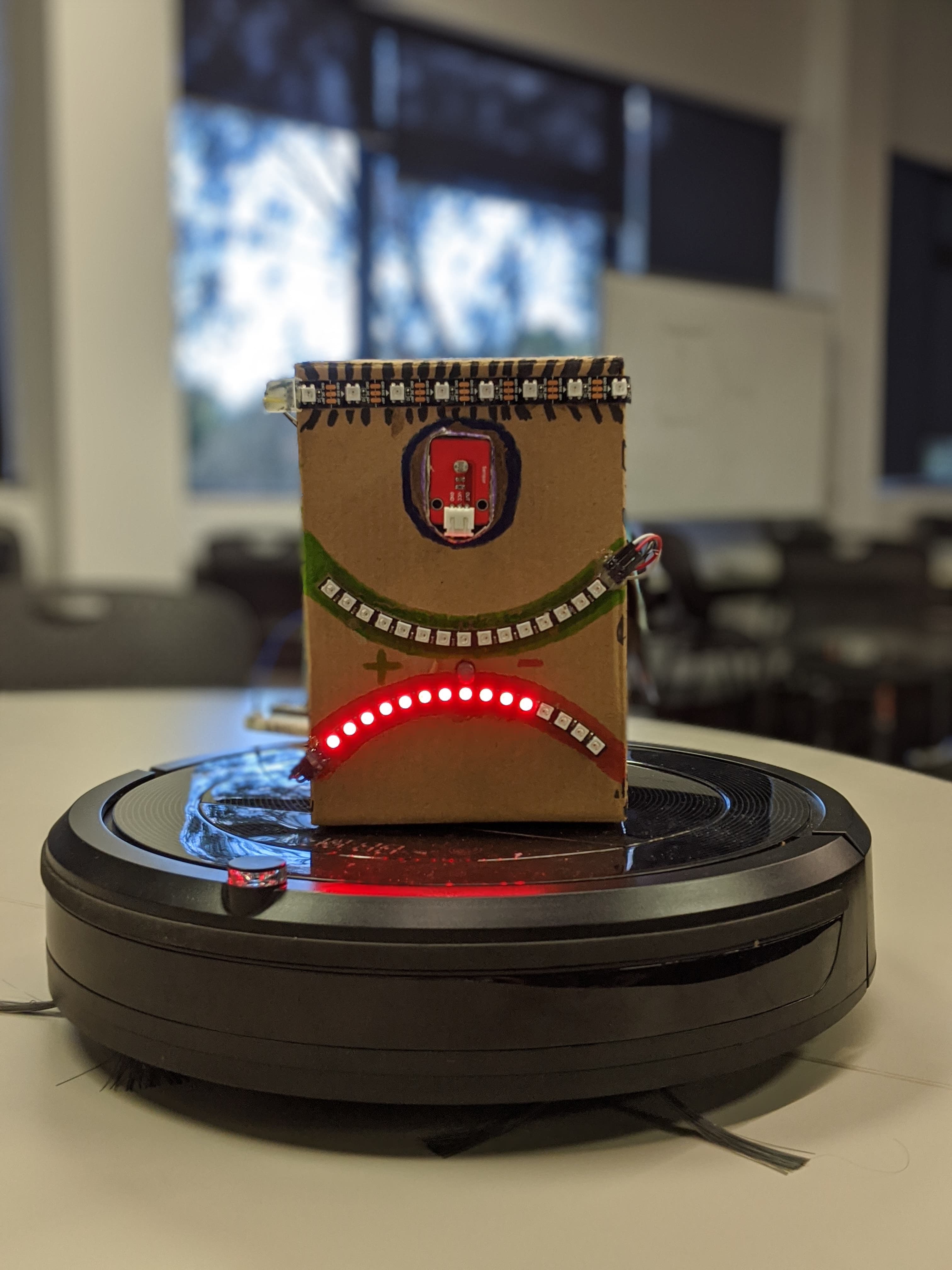
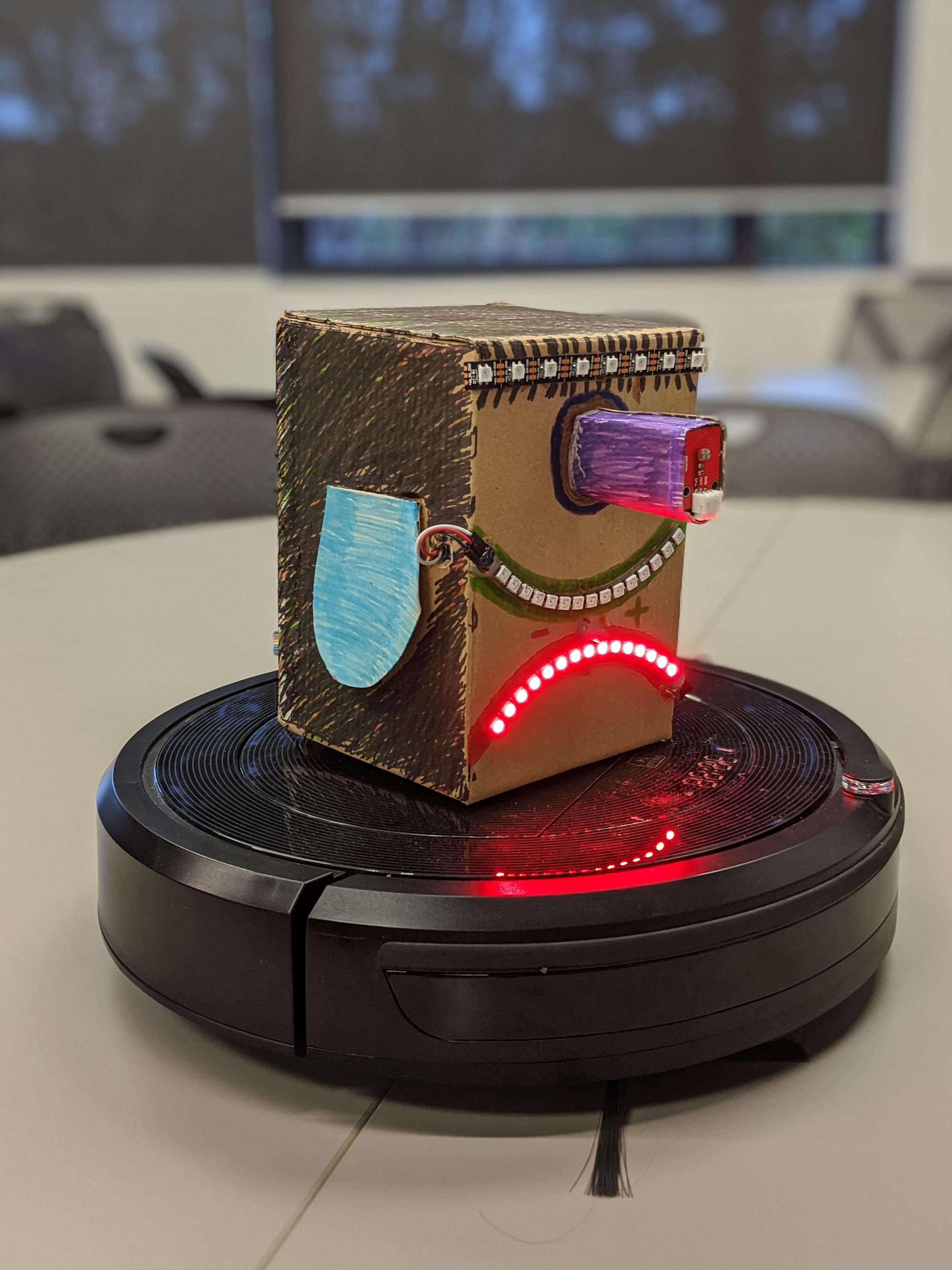
Materials
The SassMobile is comprised of various basic materials excluding the brains of the robot. The head is made of cardboard
Head: Cardboard
Body: Roomba
Mouth: LED strip
Eye: IR emitter, light sensor
Ears: vibration sensor
Brain: Arduino Uno, ESP302


Individual Component
My physical part of the SassMobile encompased the communication capabilities. This was done using a DF Mini Player piece connected to an Arduino board. The audio files are stored on a micro SD card that is accessed using the DF Mini Player that outputs sound to a speaker.
Course Journal: Link

Prototype Video
Reflection
I've had a lot of fun working in a team and designing creatively during this course. I worked well with my team and made some new friends doing so. In comparing the final product to the ideal concept, I think the SassMobile achieved most of what we set out to originally achieve. The SassMobile is able to deliver the experience of interacting with a stubborn, sassy robot and this alone is a huge success. Sassy technology is rarely seen in everyday life so it's extremely worthwhile being able to produce this experience. Ideally, the SassMobile would've been able to facilitate a proper conversation with the user, creating a stronger emotional connection. Moreover, the SassMobile would be more effective if it were able to operate independently around the house, knowing how long someone has been watching a screen and when to initiate sass. Nonetheless, the core functionality exists and so it delivers a novel, interactive user experience which was the overall studio theme. In comparison to other products within the domain of Sassy tech, I think that the SassMobile explores a indepth look at emotional technology and how sassiness is applied to be useful. It is a nice accompaniment to HandGang's robots that protect personal space.
Project Objectives
1. User spends less time on screens
By using the robot for any given time, the intended outcome is that the user will find themselves watching much less TV. The amount of time that the robot allows the user to watch TV is intended to be customisable per the user’s preferences.
2. User is aware that their treatment of the robot has a direct effect on its actions
It is through interactions (i.e. the way user treats robot) that the personality of the robot develops. For our project to be successful, this has to be self-realised by users or else the project doesn’t deliver on inducing self-reflection in users.
3. Prototype triggers an emotional response from the user
The aim of the prototype is to induce feelings in user. It may be via the talking, inputs, device or even combination of all three. Triggering an emotional response is cardinal reason for interactions to exist and without them the prototype fails.
4. User successfully hinders the robot from sassing
If the user lets the robot do as it pleases, there is no use of input interactions to be present. Hence, it is crucial that user takes part in robot’s actions and tries to stop it from stopping. If the user just lets the robot sass all the way, it shows a fault in our strategy of annoyance as cure.